
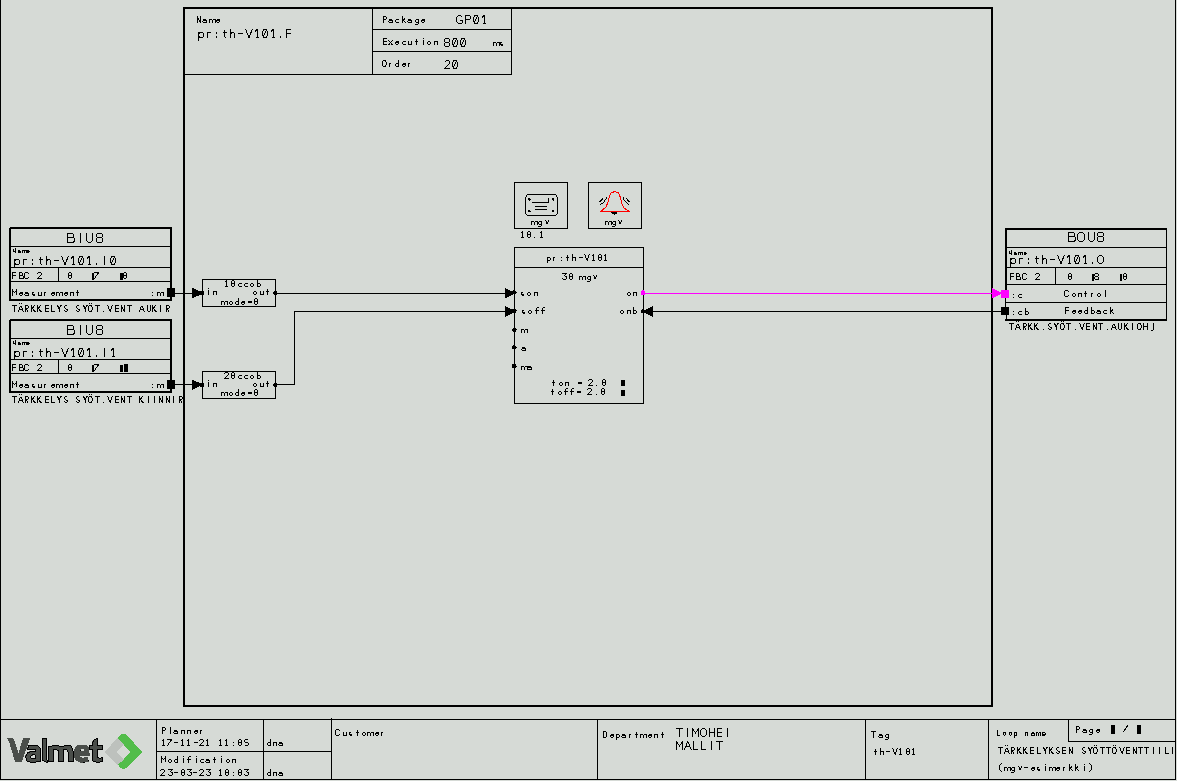
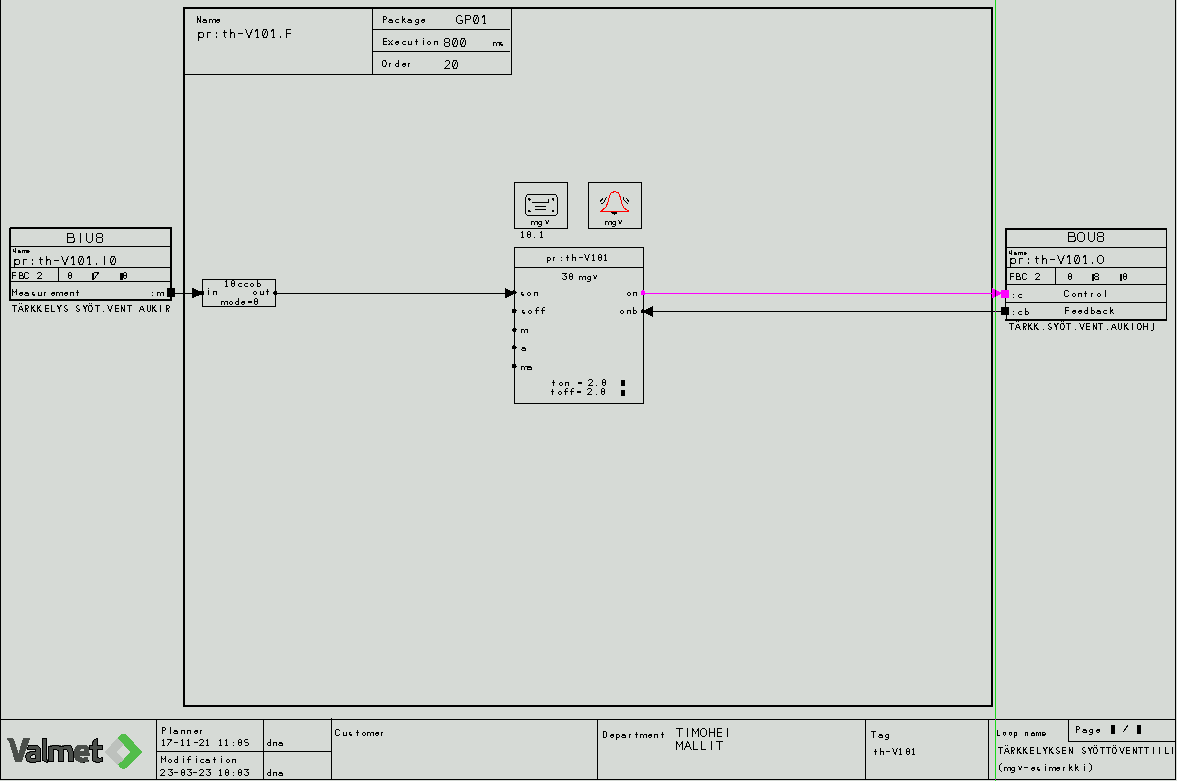
Tällä sivulla on kaksi esimerkkiä kaksiasentoista venttiiliä ohjaavasta FbCAD-moduulista. Ensimmäisessä moduulissa venttiiliin on kytketty auki- ja kiinnirajatiedot, toisessa vain aukirajatieto, jolloin kiinnirajatieto pitää konfiguroida pois käytöstä.
Lisäksi esitellään toimilohkon konfigurointiparametrit ton, toff, safe, mac, amc, ldc ja dlc.
Käyttöliittymäkonfiguroinnista on oma sivunsa.
Parametrilomakkeet (Edit > Values) tulevat näkyviin klikaamalla mgv-lohkoa tai käyttöliittymämoduuleita (positio- ja tapahtumamoduulit mgv-lohkon yläpuolella).
Parametrilomakkeet (Edit > Values) tulevat näkyviin klikaamalla mgv-lohkoa tai käyttöliittymämoduuleita (positio- ja tapahtumamoduulit mgv-lohkon yläpuolella).
Parametreilla ton ja toff määritellään ns. aikavalvonta-ajat sekunneissa desimaalilukuna. Desimaalierottimena käytetään Valmet DNA:ssa pistettä.
Aikavalvonnan avulla tarkkaillaan venttiilin toimintaa. Venttiilin toimiessa normaalisti, se siirtyy rajalta toiselle ko. toimilaitteelle ominaisen maksimiajan kuluessa. Mikäli laitteelta jostain syystä kuluukin pidempi aika päästä perille, siinä on joku vika. Toimilaite voi olla jumissa, rajatiedon välittävä virtapiiri voi olla viallinen tai ohjausenergia puuttuu.
Valvonta-ajat voidaan mgv-lohkossa määritellä esikseen kiinni- ja aukisuuntaan. Esimerkiksi venttiileillä normaali kulkuaika on suunnilleen sama kumpaankin suuntaan, mutta jos mgv-toimilohkolla ohjataan muunlaista toimilaitetta, kulkuajat voivat olla suunnasta riippuen hyvinkin erilaiset.
Aikavalvonta-ajat kannattaa määrittää hieman pidemmäksi kuin normaalitilan kulkuaika, koska prosessin lämpötilan vaihdellessa kulkuajat saattavat muuttua jonkun verran. Myös toimilaitteiden ikääntyessä ne saattavat kasvaneen kitkan tai välyksen takia hidastua.
Tällä parametrilla määritellään tila, johon toimilohko ajaa toimilaitteen automaattisesti saattaakseen sen turvalliseen tilaan. Turvatila aktivoituu, jos rajatieto on viallinen (ts. "siinä on vikabittejä päällä") tai kummankin ajosuunnan pakko-ohjaukset fon ja foff ovat yhtäaikaa päällä.
Tämä parametri on tyypiltään bin ja sen arvot tulkitaan seuraavasti:
Näillä bin-tyyppisillä parametreilla määritellään, miten toimilaitteen ohjaustahon valintaa voidaan vaihtaa. mgv-toimilohkolla on kaikiaan kolme ohjaustahoa:
Manuaali-ja automaattiohjauksia ovat ns. järjestelmäohjauksia. Paikallisohjaus ei siis ole järjestelmäohjaus. mgv-lohko voi olla joko järjestelmäohjauksella (siis manuaali- tai automaattiohjauksella) tai paikallisohjauksella. Paikallisohjauksella on järjestelmäohjauksia korkeampi prioriteetti. Pakko-ohjaukset (fon ja foff) ovat kaikista korkeimmalla prioriteetilla.
Parametrit vaikuttavat seuraavasti:
Tämän sivun kuvissa olevissa mgv-symboleissa ei ole paikallisohjauksen kytkentämahdollisuutta. Jos sovelluskohteessa tarvitaan paikallisohjausta, valitaan käyttöön mgv-symboli, jossa paikallisohjaus on kytkettävissä.