
timohei.net / My Courses / Automation Systems / MetsoDNA Configuration How-to / mgv and mtr Blocks /
This page provides two examples of an FbCAD module controlling a motor. In the first module, the run status is connected from a BIU8 card, and in the second, the run status is taken from the feedback of the start command.
The configuration parameters of the function block ton, toff, safe, mac, amc, ldc, dlc, cuu, puls, tp, and toa are also presented.
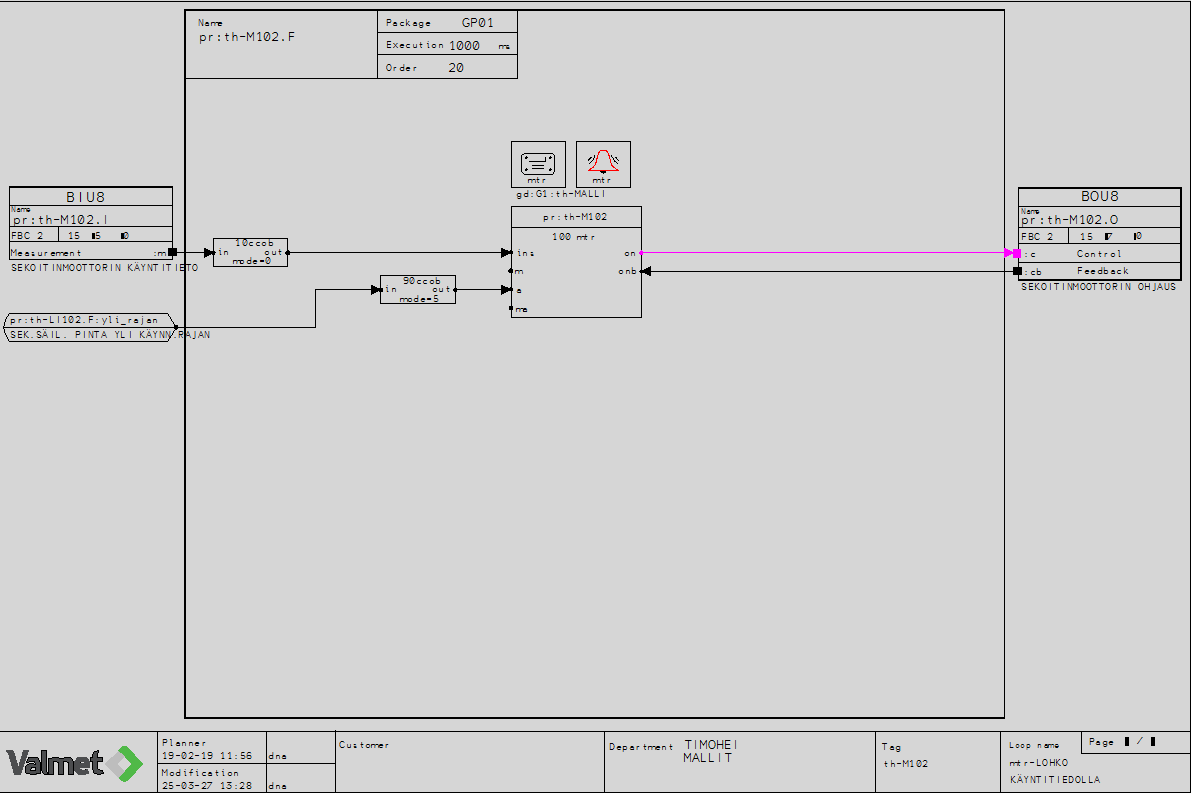
mtr - run status from I/O
- The BIU8 module reading the run status is connected to the ins input (in status) of the mtr block.
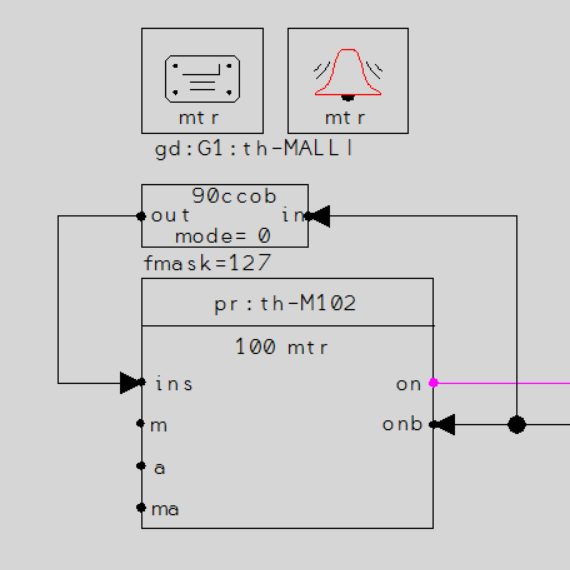
mtr - no run status in use
If there is no feedback information on the run status for the motor actuator, it must be built by connecting a signal from the onb output (on the right side of the block) of the mtr block to the ins input via a fault bit filter. The easiest way to filter fault bits is with a ccob block, whose fault bit mask fbmask is configured to the value 127. Fault bit filtering is needed because otherwise the fault state of the onb input after loading would remain running through the function block in a "crazy loop". Note the connection of the inputs and outputs of the ccob block in this case: the function block is taken from the menu item ccoX right... to select a block where the inputs are on the right and the outputs on the left.
ton, toff - time monitoring periods
The parameters ton and toff define the so-called time monitoring periods in seconds as a decimal number. In Valmet DNA, a period is used as the decimal separator.
Time monitoring is used to observe the operation of the motor. When the motor operates normally, it starts within the maximum time characteristic of the actuator, at which point the auxiliary contact information connected from the electrical cabinet contactor gives a one to the ins input. If, for some reason, it takes longer for the device to reach its destination, there is a fault. In the case of a motor, this is most often due to the tripping of a protector from the motor-related bay in the electrical cabinet, so no control voltage is supplied to the contactor.
The monitoring times in the mtr block can be defined separately for the start and stop directions.
mac, amc, ldc, dlc - enabling control authority changeover
These parameters are identical in name and function to those of the mgv block.
These bin-type parameters define how the selection of the actuator's control authority can be changed. The mtr block has a total of three control authorities:
- Manual control refers to control performed by the operator from the control room, i.e., in the case of the mtr block, driving the actuator to the on or off state.
- Automatic control refers to programmatic control from a sequence or other application.
- Local control refers to control from a local control panel near the actuator.
Manual and automatic controls are so-called system controls. Local control is therefore not a system control. The mtr block can be under either system control (i.e., manual or automatic control) or local control. Local control has a higher priority than system controls. Forced controls (fon and foff) have the highest priority of all.
The parameters have the following effects:
- mac - manual to auto changeover
- = changeover from manual to automatic is not allowed
- = changeover from manual to automatic is allowed
- amc - auto to manual changeover
- = changeover from automatic to manual is not allowed
- = changeover from automatic to manual is allowed
- ldc - local to DCS changeover
- = changeover from local control to system control is not allowed
- = changeover from local control to system control is allowed
- dlc - DCS to local changeover
- = changeover from system control to local control is not allowed
- = changeover from system control to local control is allowed
The mtr symbols in the images on this page do not have the possibility for connecting local control. If local control is needed in the application, select an mtr symbol where local control can be connected.