
timohei.net / My Courses / Automation Systems / MetsoDNA Configuration How-to / mgv and mtr Blocks /
This page provides two examples of an FbCAD module controlling a two-position valve. In the first module, open and closed limit information are connected to the valve, while the second only has open limit information, in which case the closed limit information must be configured as disabled.
The configuration parameters of the function block ton, toff, safe, mac, amc, ldc, and dlc are also presented.
User interface configuration has its own page.
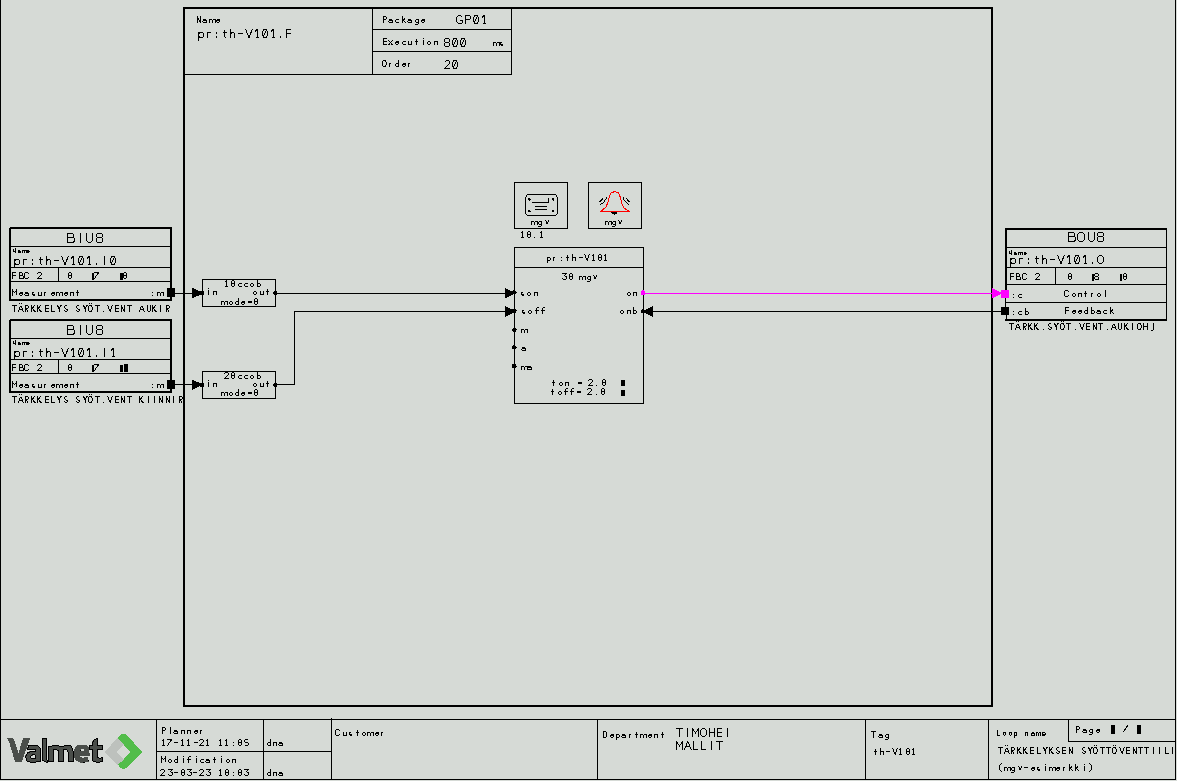
mgv - both limit switches in use
- The open limit BIU8 module is connected to the soff input (status off) of the mgv block.
- The closed limit BIU8 module is connected to the son input (status on) of the mgv block.
- The sonu and soffu parameters (son in use, soff in use) of the mgv block are set to 1.
In the image below, click the mgv block or the user interface modules (position and event modules above the mgv block) to see their parameters.
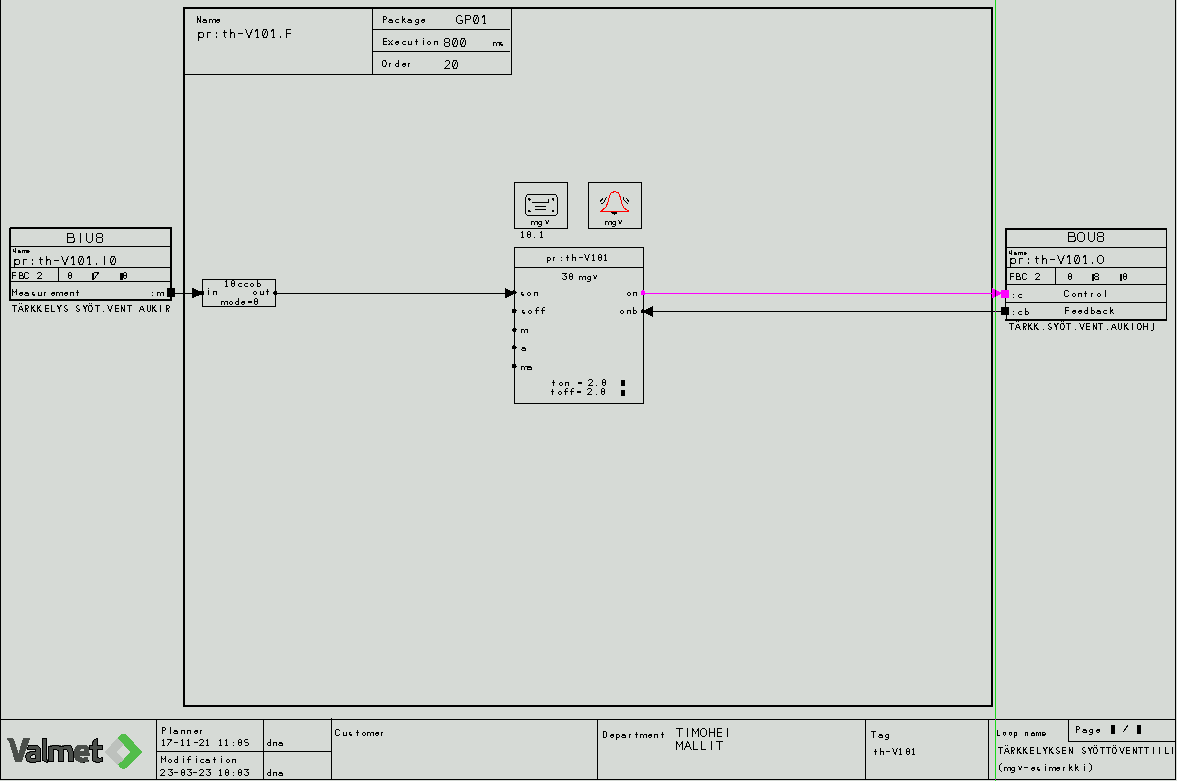
mgv - only open limit switch in use
- The open limit BIU8 module is connected to the soff input (status off) of the mgv block.
- The closed limit information is not available for this valve, so nothing is connected to the closed limit son input (status on).
- The sonu parameter (son in use) of the mgv block is set to 1 (= "in use") and the soffu parameter (soff in use) to 0 (= "not in use").
In the image below, click the mgv block or the user interface modules (position and event modules above the mgv block) to see their parameters.
ton, toff - time monitoring periods
The parameters ton and toff define the so-called time monitoring periods in seconds as a decimal number. In Valmet DNA, a period is used as the decimal separator.
Time monitoring is used to observe the operation of the valve. When the valve operates normally, it moves from one limit to the other within the maximum time characteristic of the actuator. If, for some reason, it takes longer for the device to reach its destination, there is a fault. The actuator may be stuck, the circuit transmitting the limit information may be faulty, or control energy may be missing.
The monitoring times in the mgv block can be defined separately for the closing and opening directions. For example, for valves, the normal travel time is approximately the same in both directions, but if the mgv block controls a different type of actuator, the travel times can be very different depending on the direction.
It is advisable to set the time monitoring periods slightly longer than the normal travel time, because travel times may change somewhat as the process temperature varies. Also, as actuators age, they may slow down due to increased friction or backlash.
safe - actuator safe state
This parameter defines the state to which the function block automatically drives the actuator to bring it to a safe state. The safe state is activated if the limit information is faulty (i.e., "it has fault bits on") or if the forced controls fon and foff for both driving directions are on simultaneously.
This parameter is of type bin and its values are interpreted as follows:
- safe = 0 - in the safe state, the function block drives the actuator closed.
- safe = 1 - in the safe state, the function block drives the actuator open.
mac, amc, ldc, dlc - enabling control authority changeover
These bin-type parameters define how the selection of the actuator's control authority can be changed. The mgv block has a total of three control authorities:
- Manual control refers to control performed by the operator from the control room, i.e., in the case of the mgv block, driving the actuator to the closed or open state.
- Automatic control refers to programmatic control from a sequence or other application.
- Local control refers to control from a local control panel near the actuator.
Manual and automatic controls are so-called system controls. Local control is therefore not a system control. The mgv block can be under either system control (i.e., manual or automatic control) or local control. Local control has a higher priority than system controls. Forced controls (fon and foff) have the highest priority of all.
The parameters have the following effects:
- mac - manual to auto changeover
- = changeover from manual to automatic is not allowed
- = changeover from manual to automatic is allowed
- amc - auto to manual changeover
- = changeover from automatic to manual is not allowed
- = changeover from automatic to manual is allowed
- ldc - local to DCS changeover
- = changeover from local control to system control is not allowed
- = changeover from local control to system control is allowed
- dlc - DCS to local changeover
- = changeover from system control to local control is not allowed
- = changeover from system control to local control is allowed
The mgv symbols in the images on this page do not have the possibility for connecting local control. If local control is needed in the application, select an mgv symbol where local control can be connected.